CS181 Artificial Intelligence
1. Search
A search problem consists of:
- A state space
- A successor function(with actions, costs)
- A start state and a goal test
A search space keeps only the details needed for planning (abstraction).
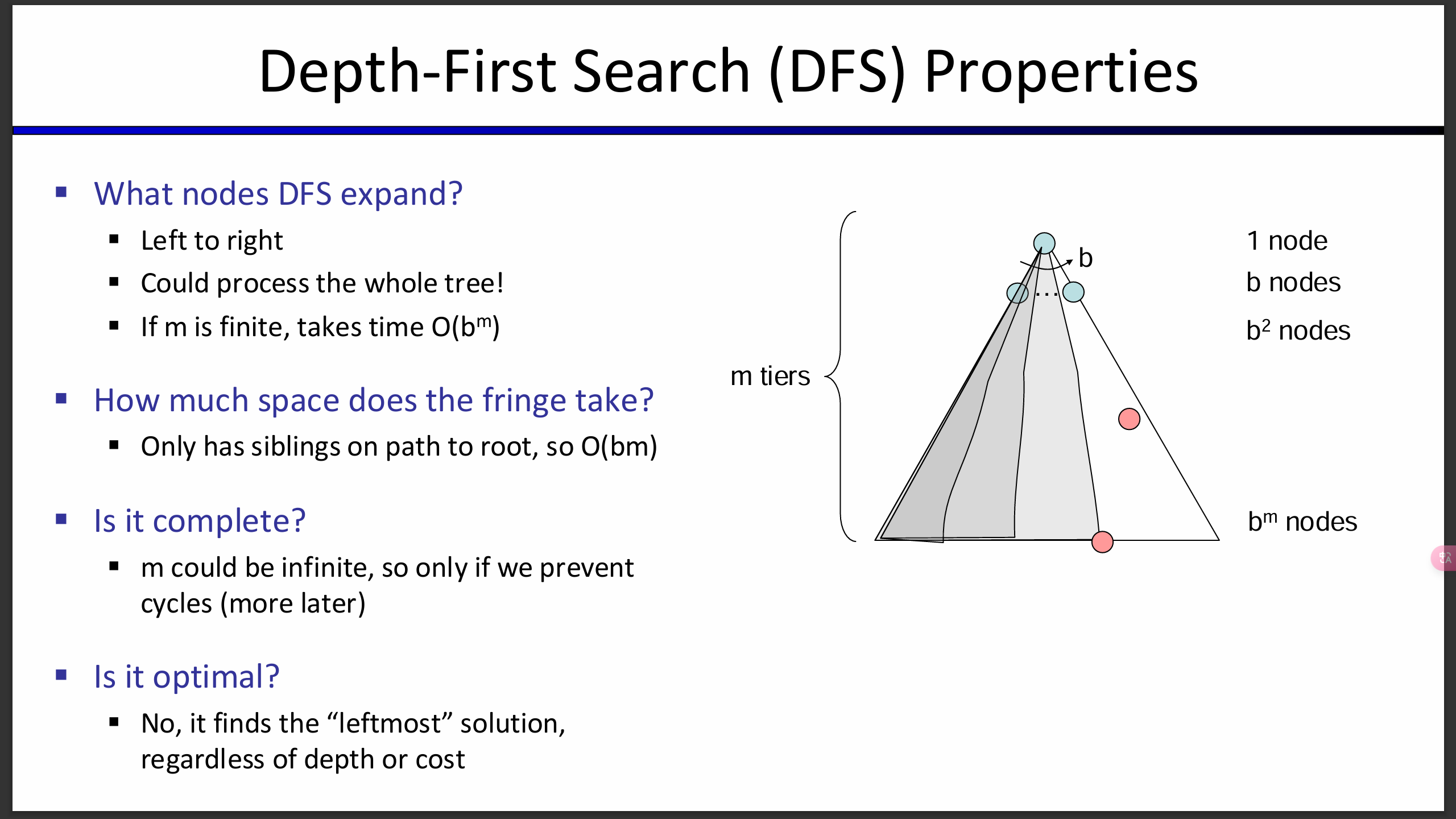
DFS
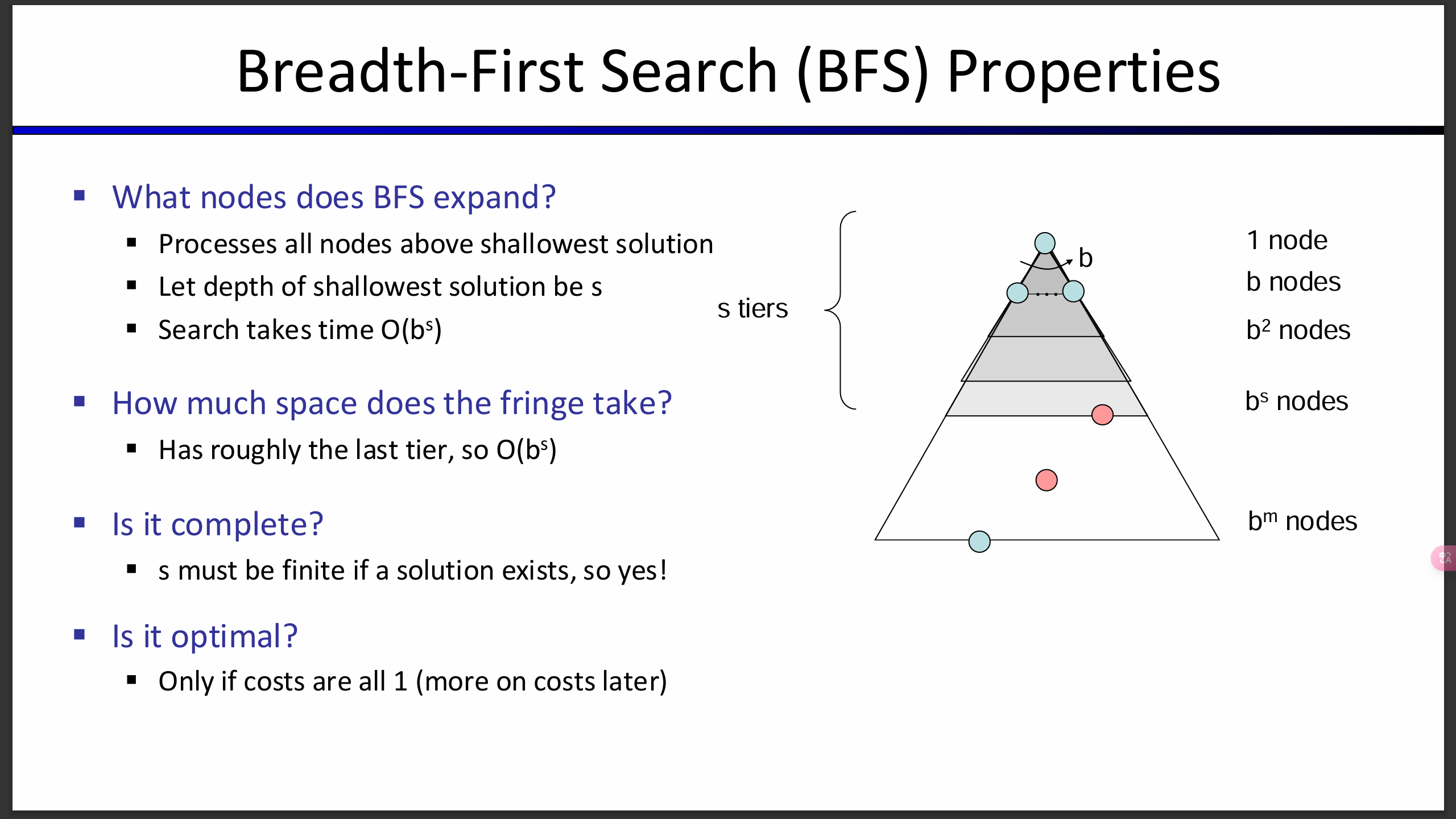
BFS
UCS
Uniform Cost Search is complete and optimal.
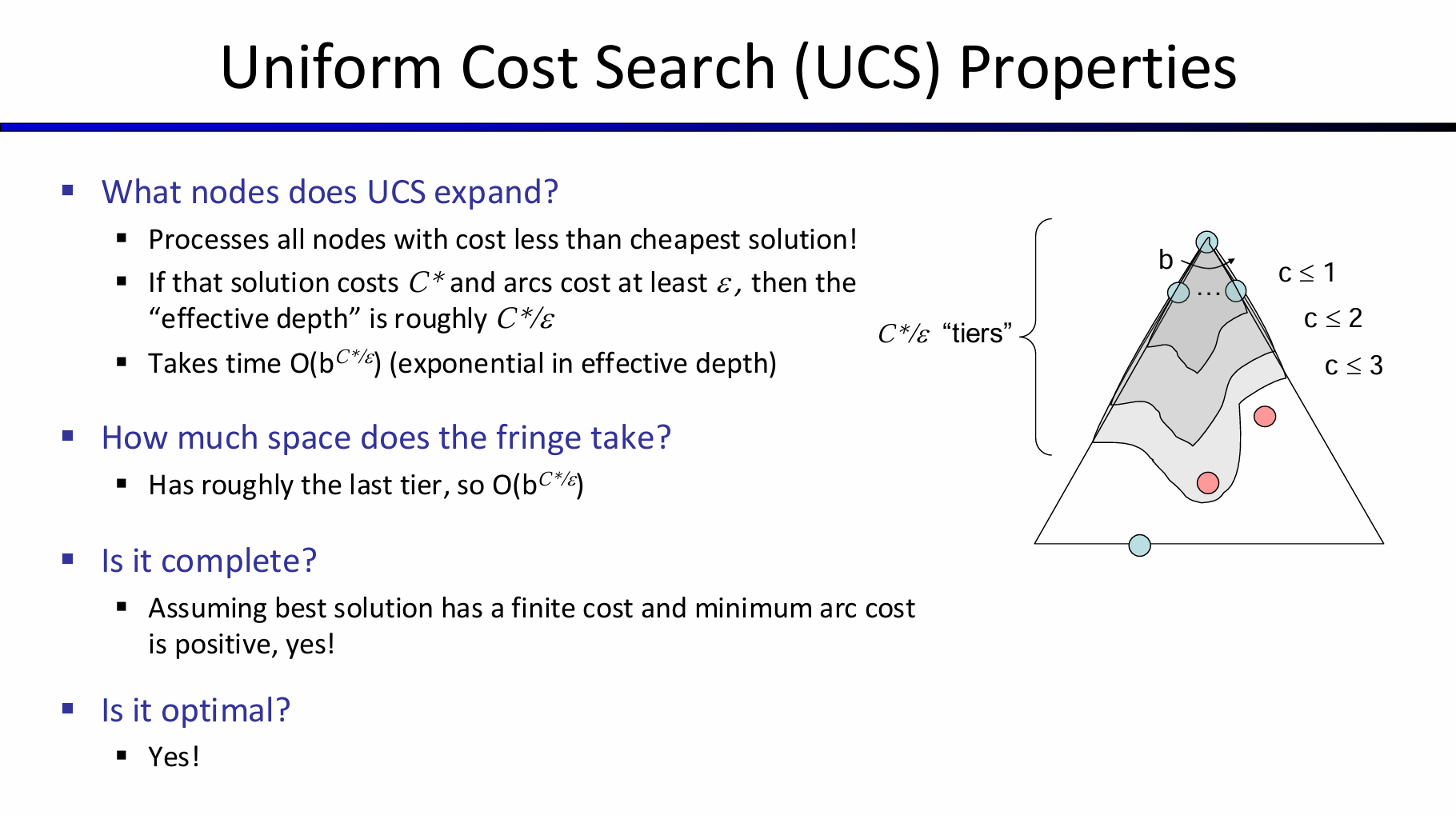
- Explores options in every “direction”
- No information about goal location
Greedy
Expand a node that you think is closest to a goal state.
A*
Admissible Heuristics
A heuristic h is admissible (optimistic) if:
$$
0\leq h(n)\leq h^*(n)
$$
where $h^*(n)$ is the true cost to a nearest goal.
Consistency

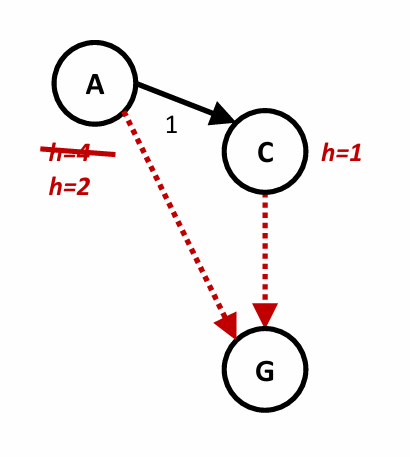
Consistency implies admissibility
$$
\text{cost}(A \rightarrow C) + h( C) \geq h(A)
$$
2. CSP(Constraint satisfaction problems)
- Backtracking
- Backtracking with Forward Checking
- Ordering
- Least Constraining Value(LCV)
- Given a choice of variable, choose the least constraining value
- I.e., the one that rules out the fewest values in the remaining variables
- Note that it may take some computation to determine this! (E.g., rerunning filtering)
- Minimum remaining values (MRV)
- Choose the variable with the fewest legal left values in its domain
- Also called “most constrained variable”
- Least Constraining Value(LCV)
Arc Consistency
After enforcing arc consistency:
- Can have one solution left
- Can have multiple solutions left
- Can have no solutions left (and not know it)
3. Adversarial Search(Minimax)
- Time: $O(B^m)$
- Space: $O(bm)$
Exactly the same as DFS.
And $m$ represents the depth of the node tree.
Depth-limited search
- Resources limits
Replace terminal utilities with an evaluation function for non-terminal positions.
Evaluation Functions:
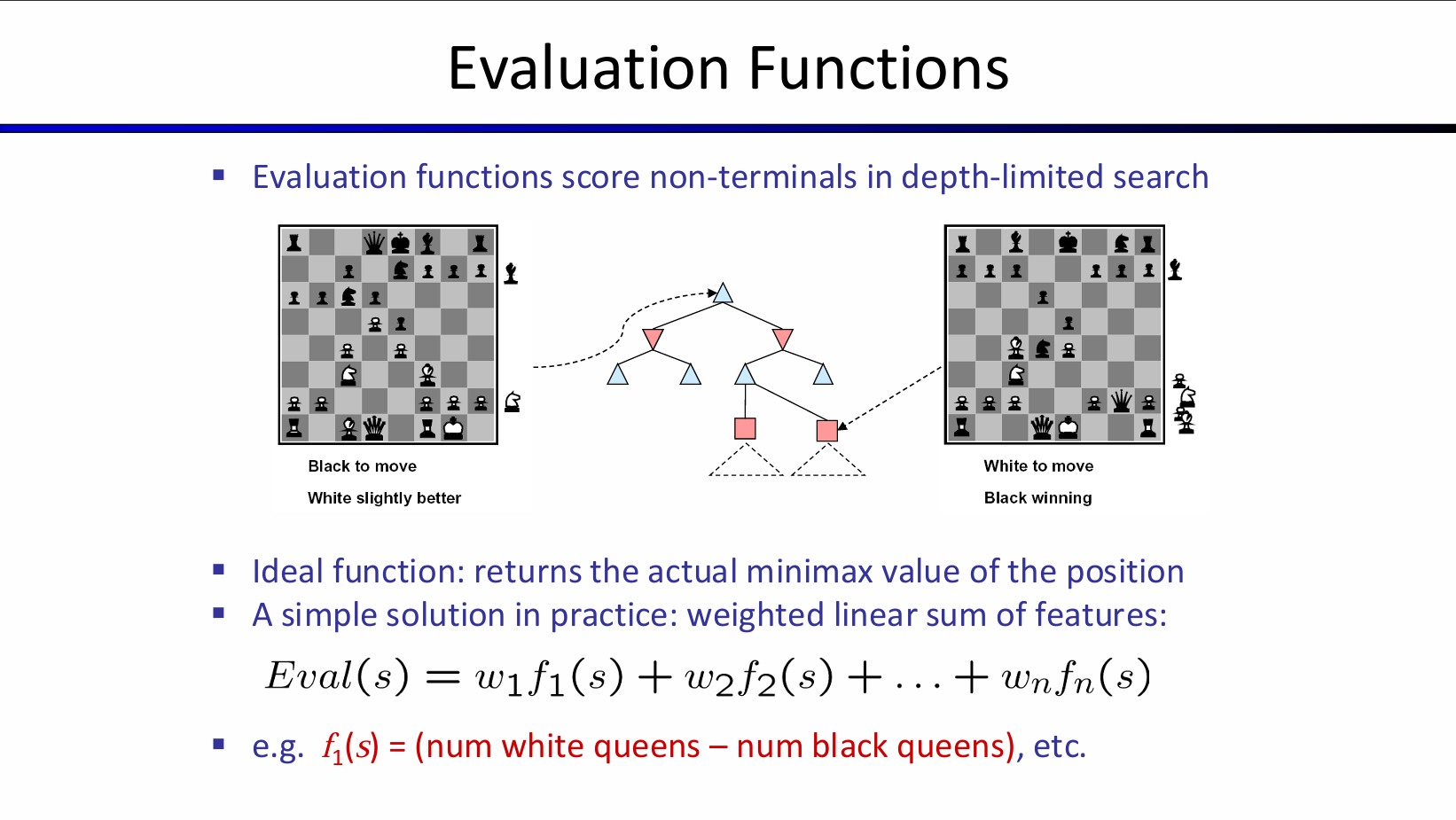
- Do not guarantee the optimal play.
- More depth makes a BIG difference.
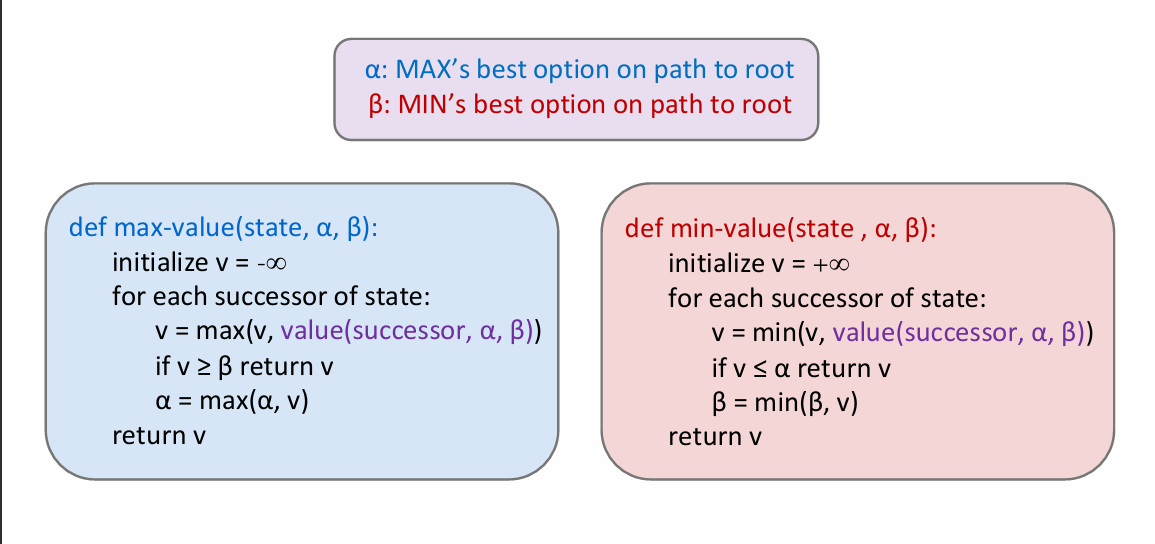
Adversarial Search $\alpha$-$\beta$ Implementation
CS181 Artificial Intelligence
http://lmehw.github.io/2024/10/11/CS181-Artificial-Intelligence/